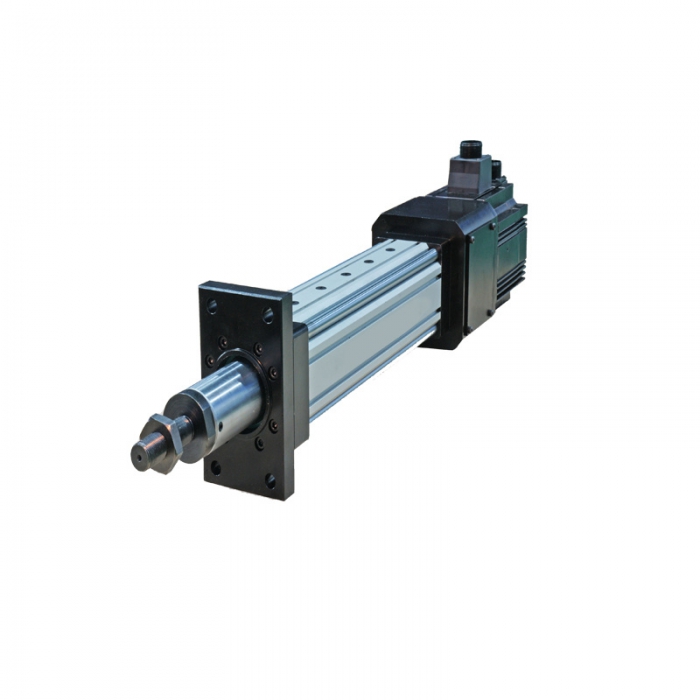
伺服电动缸的常见故障和解决方式有哪些?
阅读次数:1204
1、超程
当进给活动超过由软件设定的软限位或者硬限位开关位置时,就会产生超程报警,个别会在数控体系的显示器上显示报警内容,用到直流伺服电机的伺服电动缸依据数控体系的说明书及电气原理图,即可消除,解除报警。换枪盘高性能工业机器人系统的主要组成部分。 它可以使机器人充分发挥其功能,完成各种操作,并提高机器人的成本效益。留神:假如机床的某个轴未行使至终端位置而产生超程报警,通常是因为机床在行驶进程中限位开关线断或限位开关被货色卡住。
2、过载
通常当进给活动的负载过大,频繁正、反向活动以及传动链润滑不良或斜铁有研伤,LGN系列伺服电动缸电机能源线接地等起因时,均会引起伺服电机电流大,电机温度过高或电机过载报警。有机会床运行的进程中驱动把持单元、驱动元件、电机自身故障也会引起过载报警。个别会在数控体系的显示器上显示伺服电念头过载、过热或过流等报警信息。同时,在强电柜中的进给驱动单元上、唆使灯或数码管会提示驱动单元过载、过电流等信息。
3、爬行
产生在起动加速段或低速进给时,个别是因为进给传动链的润滑状况不良、伺服体系增益低及外加负载过大等因素所致。尤其要留神的是:伺服电念头跟滚珠丝杠联接用的联轴器,因为联接松动或联轴器自身的缺点,如裂纹等,造成滚珠丝杠与伺服电念头的转动不同步,从而使进给活动忽快忽慢,产生爬行景象。
4、振动
在进给(尤其是低速)时,机床某轴呈现振动景象通常是因为测速信号不牢固,如测速装置故障、测速反馈信号烦扰等;速度把持信号不牢固或受到烦扰;接线端子接触不良,如螺钉松动等。伺服电动抓手用直流bai电机直接控du通断,装一个压力开关和一个位置开关再加一个clutch,到了压力就直接断电然后当前位置如果用拉线的话就锁定位置,类似转盘有多个孔然后插销销死。机器人第七行走轴外部加装位置轴,用于机械手位置切换使用,增加机械手的工作站范围,本款采用伺服电机和滚珠丝杆搭建的短行程小型外部轴。当振动产生在由正方向活动与反向活动的换向霎时时,个别是因为进给传动链的反向缝隙或伺服体系增益过大所致。机床以高速运行时,可能产生振动,这时就会呈现过流报警。机床振动问题个别属于速度问题,所以就应去查找速度环;而机床速度的全部调节进程是由速度调节器来实现的,即但凡与速度有关的问题,应当去查找速度调节器,因此振动问题应查找速度调节器。重要从给定信号、反馈信号及速度调节器自身这三方面去查找故障。
上一篇:
伺服电机的由来
下一篇:
工业机器人搭配伺服电动夹爪的五大优势
相关新闻
{kind=link}